
The Robotics Renaissance
Discussion w/ Prof. Kostas Alexis, startup to $360m exit, Greek LLM, solar energy, jobs, events, and more
Friends, Startup Pirate hits 100 posts today! As ever, thank you for reading and being part of this, and if there are ways Pirate can improve, let me know — I’m always open to feedback. With that, on to this week’s piece…
The Robotics Renaissance
The following is a conversation with Kostas Alexis, Professor at the Norwegian University of Science and Technology and Head of its Autonomous Robots Lab (with some cool robotics videos on YouTube). Kostas has a long academic career in robotics across Europe and the US, being a household name in the most prominent journals and conferences in the space. We chatted about the past, present, and future of robotics and touched upon a number of topics:
Breakthroughs in AI and hardware that led to a robotics renaissance
Different stages of evolution in the industry, from Shakey to humanoids
Bringing together Gen AI with conventional robotics approaches
The importance of scalable manufacturing
What is the key blocker to making robots ubiquitous
Creating autonomous robots that are resilient
and much more.
Professor, so good to have you in the newsletter. From the outside, it seems we are in the early days of a robotic Cambrian explosion, while it's getting tough to separate signal from noise. What breakthroughs brought robotics to where we are today?
KA: Thanks for having me, Alex. Key breakthroughs have allowed us to anticipate a significant explosion in the use of robotic systems soon —maybe not in the next 2-3 years, but soon. If you focus on the public discussion, you see AI everywhere. AI is mostly considered only in the sense of software, which is very important. However, robots are physical machines that think. What's least discussed and has a significant role in recent progress is hardware, meaning the robot’s body.
Compared to a decade ago, we now have high-quality, low-cost hardware that we couldn't imagine back then. We have motors that are low priced, robust, fast, and high torque, $1 inertial accelerometers and gyroscopes, etc. This also raises questions about which companies will develop the manufacturing capacity to become future powerhouses of robotics. It's not only about doing good research but also delivering scalable manufacturing.
So, it's progress in hardware and intelligence together that brought us here today, with the latter going back to three breakthroughs in robot capabilities algorithmically:
Solving significant perception problems. For example, that a robot knows where it is without GPS.
AI planning. Having algorithms that break a task into simpler tasks, sequence them together, and plan actions or motions for the robot.
Robot learning. Robust model-based control combined with learning robot control, which you see in legged robots or drones that fly fast.
This progress is pertinent to specific platforms: drones, quadrupeds, humanoids, and mobile manipulators, but not equally to others, including underwater robots.
For centuries, people have been making machines that replicate human abilities. I'd love to get your view on the different stages of evolution in the robotics industry.
KA: Robotics does not evolve in a vacuum. It relates to many other fields, so drawing clear lines is challenging. But if we start from early times (and I don't mean Ancient Greece, the Middle Ages, or da Vinci's inventions, as the idea of making robots goes back centuries), say the 1950s, at that point, we already could make things work automatically.
The first key milestones in the field were around the 1970s-1980s when we created robots such as Shakey, industrial manipulators in factories, and the first bipedals. This was the advent of machines which replicated basic abilities, primarily manipulation, and showcased the ability to navigate the world, avoid obstacles, etc. Meanwhile, the first algorithms to control task-specific systems were introduced, replicating and mimicking specific actions and doing general tasks like going from A to B without colliding, grabbing items in a particular way, walking like a bipedal, etc.

After the 1990s, a more modern view of robotics was introduced with machines that could fly and swim, rovers, and the first legged robots. The work of independent researchers in control, optimisation, statistical learning, and computer vision enabled us to experience first glimpses of modern machine learning and neural networks embodied through robots. Even back then, we had robots that navigated and knew where they were, although these couldn't complete larger tasks, e.g. traverse strenuous environments and deal with grabbing and manipulating complex objects.

After the late 2000s-early 2010s, the industry entered the wider-scale commercialisation phase of autonomous robots — construction, agriculture, drones for inspection, etc. Note that until then, robotics was dominated by model-based approaches and human-based engineering of algorithms and hardware design. Simultaneously, modern machine learning and data-driven methods emerged and largely dominated the field, allowing robots to solve previously impossible problems, such as efficiently knowing what objects lie ahead or using deep learning to learn how to walk, fly, etc.
Fast forward to today, social media are flooded with videos of robots doing parkour and yoga or drones flying faster than a human FPV pilot. Big tech and startups raise tons of capital to take robotics mainstream, and humanoids are the latest trend. But to go back to my original point about bringing together machines and algorithms, this progress is attributed to robotics and traditional AI evolution. Perhaps we could even rename "robotics" to "embodied AI" because it's essentially AI with a body that is intelligent only to the extent of these bodily interactions with environments.
There was a heated debate at ICRA (top robotics conference) last month on whether Gen AI will turn many traditional robotics approaches obsolete. I understand we're currently at a turning point. What's your take?
KA: It's clear that new technologies are already disrupting conventional robotics approaches (for lack of a better term). But I think it all comes down to understanding the problem at hand and determining the best approach instead of going with the most fancy one. The best approach may be rather conventional, it may exploit the most recent advances in neural networks, or take the form of an interesting combination of the two.
We had a similar wave of debate when I started as a professor in 2015 when people used to disregard older approaches in favour of neural networks. Nowadays, we have elegant, computationally fast solutions, including using models from physics based on differential equations, analytical solutions, model-based control, and conventional computer vision, which can solve a wide variety of problems very well, while often offering guarantees. Following the latest shiny algorithm just for the sake of it is futile.
On the other hand, deep neural networks have allowed us to solve new problems by using a lot of data and novel ideas about how networks are trained. That is in combination with advances in hardware, e.g., sensing and compute. Generative AI is transforming our field, but I believe it's the marriage of both Gen AI and conventional robotics approaches that will lead to exponential progress in embodied AI. In other words, the best path forward is that the so-called conventional methods are combined with the “raw” power of deep neural networks and large datasets. We need the best of both worlds.
You raised the importance of hardware. What projects do you pay attention to on that side of things?
KA: As much as I'm an academic (and this means we typically don't pay much attention to how things are built), it's critical to say we shouldn't disregard the importance of scalable manufacturing. If we want to see robots all around us, we need manufacturing with actuators and sensors at scale, low cost, and high quality.
At the same time, the industry is making progress with new tech. We recently had a new type of sensor called event-based camera, which indicated that we can use less data to solve equally complex problems of how a robot sees and navigates the world. With less data and cheaper computational methods, we can have faster, more agile robots as the latency is reduced. Sensors that facilitate low latency response are crucial towards making robots safe at all times by enabling fast reaction times when an adversarial scenario occurs.
Several technologies in development can give robots new sensing capabilities that are, to an extent, beyond what humans can achieve, e.g. miniaturised millimetre wave radars for robots to operate through visually degraded conditions such as smoke. There is a new frontier of capabilities for robots — how they move, see, and progress — and sensing and actuation are essential.
Beyond hardware, I also pay close attention to certain methodological innovations in our field. Today, those mostly relate to learning, and a key direction to look out for is foundational models for robot control.
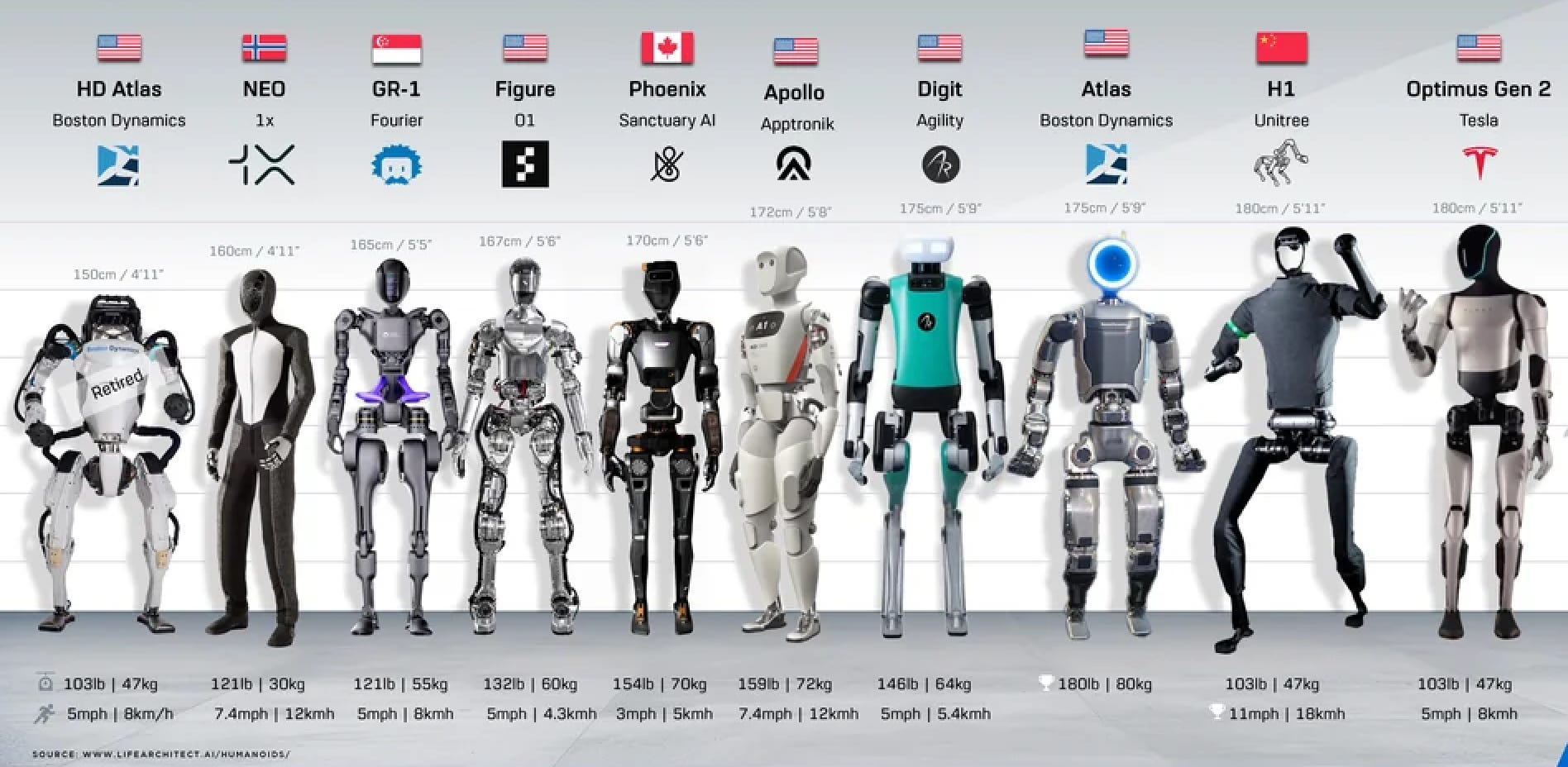
Humanoids… Obviously cool on paper with a lot of these companies selling hype. However, production in real-world applications with economics that make sense is incredibly hard, and the gap from lab to industry is very wide. So, are humanoids cool just for robotics engineers and researchers, or do you see humanoids and multi-purpose robots becoming commercially viable and good businesses soon?
KA: Everybody who has read Isaac Asimov's books wants a humanoid around them. It's sci-fi turning into reality. However, the challenge is the expectation of a humanoid operating in unconstrained environments — a true general-purpose robot. Our industry is surprisingly good at making systems work in particular environments to handle specific tasks. However, we're still not able to make robots operate anywhere. Robots do not generalise well against the complexities and uncertainties of the real world, and this is along the lines of Moravec's Paradox: "Whatever is hard for humans is easy for robots, and whatever is easy for humans is difficult for robots."
We have to create an insane amount of data in training to expect robots to operate robustly in some spaces, and if we fail to include specific settings in training data, they will likely not complete the task when encountering a novel experience. In such cases, robots are still unable to learn quickly, as they are not good at learning from sparse data. LLMs are an exciting, complex field but do not accommodate the uncertainties of the real world, e.g. my house vs your house, my house vs a construction site, or, in the case of autonomous vehicles, driving in San Francisco vs Athens vs Mumbai.
Is this inability to generalise the key blocker to making robots ubiquitous at this point? If so, how shall we address it?
KA: The critical question is, "How can we make robots resilient?" By resilience, I mean that if something happens, the robot should find another way to achieve a task, e.g., slower or abandon the task entirely if there's no path to completion, prioritising its own safety and the safety of its surroundings.
Resilience goes through two avenues: body (a system that can sustain a lot of challenges or even some damage through its body, like humans and animals) and intelligence (being efficient and having several ways to achieve the same task). For instance, a robot uses sensors to map the world surrounding it, but as it navigates, it detects an object and tries to avoid it. However, it's possible that this primary collision avoidance functionality breaks. A robust robot should have a secondary functionality (perhaps reactive learned using a neural network) that helps it avoid obstacles and complete the initially assigned task. We want resourcefulness and redundancy in robotic systems, both in hardware and software. Hence, resiliently autonomous systems can significantly contribute to the rise of ubiquitous machines.
There's still a lot of research and technology to be developed, but I think creating mobile robots that operate freely in the general world and manipulate objects dexterously will be a true ChatGPT moment for robotics.
What are the geopolitical implications of the rise of robotics, if any?
KA: Every country needs a roadmap for robotics with use cases that fit its own economy. It starts with an understanding of its particular needs and continues with funnelling resources towards developing technology that meets such criteria. I have seen this happening in countries such as the US and Norway. In Greece, I believe four pillars would make sense to deeply consider: agriculture, aquaculture, construction, and defence.
I'd love to shift gears and zoom in on your work at the Autonomous Robots Lab of the Norwegian University of Science and Technology. What are your main research activities these days?
KA: We mainly focus on designing software for resilient autonomy, with a focus on flying robots and a recent expansion to underwater, which relates to the fact that we are in Norway, in addition to our personal interests and certain similarities between flying and swimming. This goes back to the idea of resilience with interleaved layers of autonomy that I described before, which is that robots should have multiple ways to achieve the same end goal and do so in a safe manner. This is the core strategy of our lab.

Furthermore, we research several subfields, such as:
Perception for navigation in visual degradation environments (e.g. smoke).
Robotics learning to instill the capability of safe interactions (e.g. avoidance or safe contact with the world) when conventional techniques, including mapping, fail.
Computational co-design of the robot's body and brain. The vast majority of robots are miniaturisations of human concepts like small cars or helicopters — even the quadrotor was designed for humans originally — or designs that look like dogs, humans, etc. There's no reason why these designs are best for robots. So the following question arises: "If we design new ways that robots move and act, will this give rise to new ways that robots think?" This is an exciting field that research teams worldwide are exploring. You can find relevant research papers from 20 years ago, but people lacked the computational tools we have today to advance their understanding.
Perhaps for those interested, there is a recent keynote at IROS 2023 that summarizes some of our research.
How would you advise a young kid who wants to get into robotics? Where would the 18-year-old Kostas start from?
KA: In terms of hard skills, robotics certainly require an understanding of mathematics, physics of motion, coding, and, additionally, design of hardware. On soft skills, robotics requires creativity and motivation. That's why every good roboticist I've met has read science fiction. The last thing I want to highlight is that roboticists need to study the economy, how humans work and what problems they solve with their own cognisance, reasoning or physical capabilities. That's the only way to build valuable applications for the real world.
Kosta learned a lot today. Thank you!
KA: Appreciate it, Alex.
Jobs
Check out job openings here from startups hiring in Greece.
News
Our next homes may come from a fully automated factory delivered at a fraction of today's time and cost. At Marathon, we announced our investment in DataForm Lab, a company automating offsite manufacturing and helping manufacturers assemble buildings in factories.
Uizard, an AI-powered tool that helps anyone create product designs in minutes, was acquired by collaboration platform Miro. Hosted the founder a few months ago in this newsletter — check out our conversation.
AcuityMD secured $45m Series B for its commercial intelligence platform for medical manufacturers.
iCOMAT secured $22.5m Series A led by 8VC and NATO Innovation Fund with participation from Velocity Partners VC to automate composites manufacturing. One of my favourite interviews from a couple of years ago.
Evodiabio raised €7m to revolutionise the market for sustainable aroma.
Memory compression technologies company ZeroPoint raised €5m Series A.
Keragon launched out of stealth with a $3m Pre Seed for its no-code workflow automation designed for the US healthcare industry.
Tendertec announced a £440k round for its AI care assistant for the elderly population.
Ask Wire, a real estate data analytics company, announced funding.
Resources
The story of Instashop from startup to a $360m exit, fixing the broken food chain, and sustainability data for building materials in the latest Open Coffee Athens.
When good docs go bad: Learning from a PM's misstep from Manos Kyriakakis, Product Lead at Skroutz.
Behind the scenes of the first Greek LLM.
Tech and Greece's dilemmas: Drones, Nukes and AI from Jason Manolopoulos, Partner at L-Stone Capital.
Advice to my younger developer self from Vagelis Koutkias, Engineering Manager at Datoptron.
About solar energy from Nikos Fertakis, Head of Product at Skroutz.
Tech vs business. A love-hate relationship? with Mathilda Nathan, co-founder & CEO at BORRN and Renia Rigopoulou, Senior Product Manager at Orfium.
The way of fast execution from the Skroutz team.
Events
Hack The Box Thessaloniki meetup: 0x01 Nibbles on Jun 15
Remote Work Athens #1 on Jun 18
3rd Athens eCommerce Meetup on Jun 19
Greeking out in San Francisco by Endeavor Greece & Big Pi Ventures on Jun 19
Founders stories: from A to now by SaaStock Local Athens on Jun 19
If you enjoyed this, hit the like button, and if you didn’t please do drop me some feedback. Find me on LinkedIn or Twitter.
Will be back in your inbox in two weeks,
Alex
Congrats on reaching the 100 issues milestone. Next stop: 1000!