
The State of Robotics
When will robotics have its ChatGPT moment?
This is Startup Pirate #113, a newsletter about technology, entrepreneurship, and startups every two weeks. Made in Greece. If you haven’t subscribed, join 6,710 readers by clicking below:
I launched a YouTube show I think you’ll like. It’s a series of short documentaries to tell the stories of the most ambitious technologies made in Europe. The show’s title? Ad Astra.
"To the stars" (in Latin) to highlight the imaginative and ambitious culture, the cutting-edge technological breakthroughs, and the resounding, captivating impact of it all. In this show, we tap into the past and present of Europe building the future.
The first episode is the story of Concorde, the fastest commercial plane ever flown. You can watch that right below:
Europe has given birth to some of the most exciting and ambitious technologies of our day. Companies like ASML, Airbus, BioNTech, DeepMind, Novo Nordisk, Spotify inherit a proud legacy of engineering excellence: Concorde, the Large Hadron Collider of CERN, the Rolls-Royce engines that propelled the allies to victory in WWII. This video I put together a few months ago should give you a glimpse.
Subscribe to Ad Astra's YouTube channel and stay tuned for Episode 2. I’d love to hear your feedback, thoughts, and suggestions.
Europe needs to dream, and then we need to build.
Ad Astra, Per Aspera.
Now, on to today’s Startup Pirate…
The State of Robotics
"Everything that moves will be robotic someday, and it will be soon" (Nvidia CEO Jensen Huang, two days ago).
Is robotics about to have its ChatGPT moment? How do we accelerate robotics adoption? Are humanoids pure hype or the future of physical labour? How do the West and China compete in the race for robotics dominance?
Today's guest has the bird's eye view of robotics working with some of the largest names across tech and the industry. Klajd Lika is the founder & CEO of Bota Systems, an ETH Zurich spin-off backed by Marathon, that develops software and hardware to give robots the sense of touch.
Let's get to it.
Alex: When did you develop your first robot?
Klajd: During my undergraduate at the National Technical University of Athens, I first started programming some Arduino robots, you know, these open-source tiny computers on wheels that you can use to build simple machines. This is a great way to learn robotics, and I highly recommend it to anyone who wants to immerse themselves in the field.
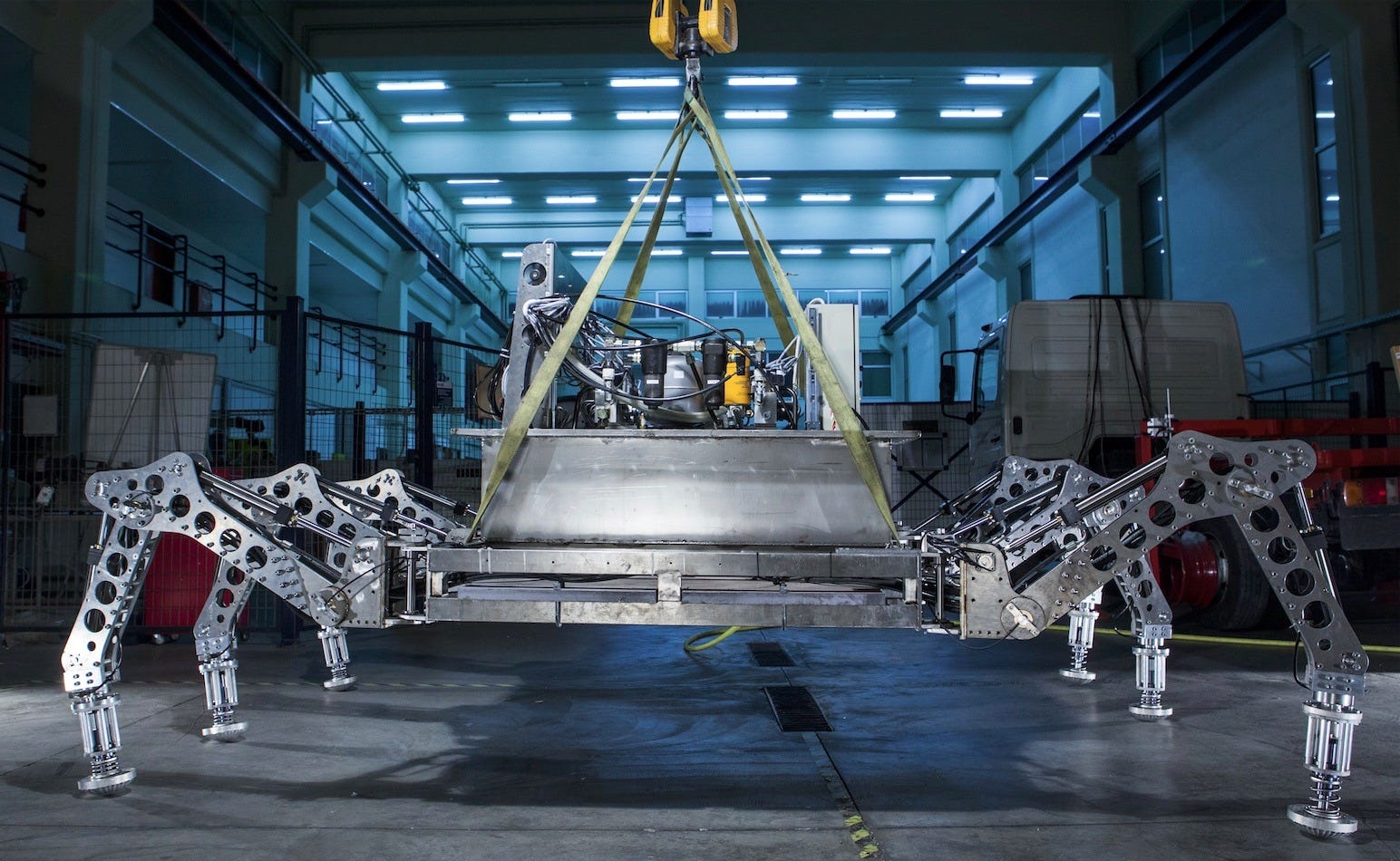
Right after graduation in 2013, my first job was designing and manufacturing a subsea robot to carry and bury big telecommunications and power cables under the seabed. It was a six-legged spider robot weighing 1.2 tons that could carry a payload of up to 500 kg using hydraulic actuators (not electric like we're used to nowadays). From design to production, it took about 2 years; it was certainly not an easy feat, and I learned a ton.
Alex: How was the idea of Bota Systems first developed? It's obvious now that, just like humans, robots need to interact with their environments precisely and safely, but that probably wasn't the consensus when you started in 2013.
Klajd: Designing legged robots that walk in the real world and not in a lab (where everything is perfectly positioned) made me realise the importance of robots "complying" with the terrain—a terrain that could have objects, rocks, or be uneven. We call this "active compliance" in robotics.
This mimics human biology. We understand how much pressure we should apply on the ground through our feet. We apply different forces when wearing training shoes versus walking barefoot or on the beach versus a wooden floor. Similarly, robots need to get sensory feedback from the surfaces they interact with, understand the applied forces, and use that to move precisely and safely. If they don't, it would be like the robot walking in high heels…
I quickly understood the potential of developing robots that can adapt to their environments by being force-sensing. Of course, that applies not just to legged robots but to any robot. So, I started Bota Systems to build sensors that give robots the sense of touch and accelerate robotics adoption.

Alex: What applications do you enable with Bota's sensors?
Klajd: Initially, we started to enable legged robots to walk. We quickly expanded to use cases such as polishing, sanding, assembling, cleaning, grinding, etc. Robot sensing is paramount for any application where dexterity and adaptability are key. See, the first applications were all about programming robots to move objects from A to B in a predetermined manner and detailed knowledge of parts to sub-millimetre accuracy. No surprises; otherwise, the robot would fail.
But that's not how the real world works. You need robots that interact safely and precisely by adapting to changes like humans do. The same way you adapt a key's position to unlock a door. Today, Bota Systems’ sensing platform is a fundamental part of the modern robotics stack, empowering from industrial robots to legged robots like humanoids. Our technology is used by some of the biggest names in tech and robotics.

We develop sensors mounted in various places of a robotics structure, from a robotic arm to a robot's leg. A humanoid might need tens of them in total. The sensors aggregate data from the robot's interactions, which are later used to program the robot accordingly. Everyone talks about AI in robotics and improving algorithms, but data is the real bottleneck. Unless you use a plethora of sensors, data will not be enough nor precise for robots to learn how to interact efficiently in the real world where every setting is different (your house versus my house, a large factory versus a small production line, roads in San Francisco versus Mumbai, etc). Force sensing is one of the fundamental data modalities for robotic AI.
Alex: How far can you go using only computer vision for robots to interact with the environment?
Klajd: In physics, you apply force to mass and the mass moves. Cameras can capture the effect: the motion from A to B because of a force. What they don't capture is the cause that made the mass move. Even worse, there are cases where, even though force is applied, the mass does not move. To develop smart robots, you cannot go far without force-sensing.
Alex: Switching gears, everyone talks about humanoids. Last month, I also read rumours that OpenAI is considering building one. Why are we all obsessed with this form factor and not another legged robot or a robotic platform on wheels?
Klajd: A big part of the robotics community aims to replace facets of physical labour and have general-purpose machines that can be deployed everywhere. So the idea is that such machines should look like us. Also, humanoids have been around for a while; it's not a new form factor even though it recently reached escape velocity, being all over mainstream media. The promise is that we will eventually get to general-purpose robots by building powerful AI.
The community knows we are not there yet, so most companies focus on specific use cases. For instance, Agility Robotics builds humanoids that pick objects and move them from A to B for warehouses. Figure focuses primarily on automotive, whereas 1X on household tasks. I believe it's utopian to talk about general-purpose robots for the foreseeable future, but multipurpose robots (e.g. they could wash dishes AND iron shirts) are not that far away.

Alex: If data scarcity is the main bottleneck for wider robotic adoption, how do we address this?
Klajd: Like humans, robots learn by example. You must expose the robot to all the scenarios it might face by training the AI model using relevant data. For instance, a cleaning robot should be familiar with mops, brooms, vacuum cleaners, different surfaces, etc. We don't have the breadth and depth of physical data for most applications.
There's a lot of data exchange inside the community via open datasets, but that's not enough. Synthetic data is frequently used, where engineers simulate specific scenarios in silico and program the robot to navigate similar settings in the future. An interesting strategy is feeding AI models with YouTube videos of humans performing tasks and translating them into robotic actions. Skild AI recently raised $500m to build such intelligence.
OpenAI made ChatGPT happen because of the volume of text data they could retrieve online. We still lack such large datasets of physical data, movements, etc, which will lead to the ChatGPT moment for robotics. At Bota Systems, we are uniquely positioned to become a core part of robotics AI training by enabling real-world robotics datasets through force-sensing sensors.
Alex: Any latest developments in robotics AI you are currently paying attention to?
Klajd: We're paying close attention to AI models for manipulation and locomotion, which can take different input modalities like text, images, videos, etc., and generate robot actions in space, measured by robot sensors like force-torque and tactile in addition to encoders and cameras. By principle robots:
Receive commands in voice, text, code, etc (human language)
Translate them to positions, velocities, and torques at the joints (machine language)
Generate forces to the external world (actions)
Like Covariant's RFM, these models produce semantically enriched representations of scenes that provide robots with a deep understanding of language and the physical world. By tokenising the different modalities into a common space, the model can perform next-token prediction as a Large Language Model. It understands any modality as input and predicts any modality as output. The goal is to enable robots to simulate the result of future scenarios and select the best course of action. Force sensing is as fundamental to AI robotics as text is to Large Language Models, and we are happy that various industry pioneers are already working in that direction.
Alex: Before we wrap up, how do you see the competition between the West and China in the race for robotics dominance? For instance, Unitree's (China) robot dog is an order of magnitude cheaper than Boston Dynamics (US) or ANYbotics (Switzerland). How can the West accelerate robotics adoption in such a landscape?
Klajd: China open sources a lot and gives access to people to build on top. One company builds on top of the innovations of another. That's not happening in the West. However, a key difference between Unitree and Boston Dynamics or ANYbotics is that Unitree and the like offer just the hardware, whereas in the West, companies offer vertical services. That's a very different strategy and positioning. Boston Dynamics or ANYbotics promise to solve the end customer problems directly, e.g. inspection, warehouse automation, remote investigation, etc. On the other hand, Unitree offers a platform for others to build applications on top, which partly justifies the 10x lower cost. It remains to be seen which strategy works better.
In addition, there's the aspect of building industrial capabilities. Robotics is not just software. It's also manufacturing, hardware, supply chains, etc. We have the manufacturing know-how—the IP— in the West, but we lack manufacturing capabilities at scale and robust supply chains. We notice companies building hardware failing one after the other, and this shouldn't happen if we want to be competitive in the future. Most Western companies still source robotics parts from China. Our electronic devices, drones, and cars are made to a smaller or larger extent in China nowadays; we should avoid a similar future for robotics.
Alex: Klajd, thank you so much!
Klajd: Enjoyed our chat, Alex.
Jobs
Check out job openings here from startups hiring in Greece.
News
At Marathon, we led a €1.6m Seed in AI robotics Progressive Robotics to transform industrial automation and enable new robotics applications for SMEs.
Pod (Layer 1 blockchain) raised $10m Seed led by a16z and 1kx.
Oumi (open-source AI platform) announced a $10m Seed led by Venrock.
Intryc (AI customer support) raised $3.1m Seed led by General Catalyst.
Smartify (cultural travel app) secured £1.5m led by Metavallon VC.
Cleardrop (solar energy tech) raised funding from Genesis Ventures.
Coinbux (payroll tech) raised €320k led by Genesis Ventures.
Neurohive (farm tech) announced €150k from Genesis Ventures.
Pinepeak (wildfire prediction) secured funding from Genesis Ventures.
Hosthub (proptech) secured additional capital.
Flexfin (factoring fintech) was acquired by Alpha Bank.
Transifex (translation software) was acquired by XTM.
Nothing (consumer tech) crossed $1b in lifetime sales and seeks to raise over $100m.
Saronic (defense tech) in talks to raise $500m Series C.
New €26m VC fund launch based in Cyprus 33East.
Resources
We released the annual report on funding rounds and exits for Greek-founded startups.
Leaving academia to build a startup and make robots smarter with Fotis Dimeas, co-founder & CEO of Progressive Robotics.
Bootstrapping a company to $20m ARR with Vangelis Mihalopoulos and Dimitris Tsingos, founders of Yodeck.
A set of 21 lectures on machine learning in Greek by Constantine Caramanis, Professor at UT Austin.
Blueground's journey from early investments to a global unicorn with Apostolos Apostolakis, Partner at VentureFriends.
How Skroutz handles real-time schema evolution with Kostas Diamantis, Tech Lead at Skroutz.
Side projects 101 with Konstantinos Livieratos, Founder at Schedul.
A prioritisation framework for AI-driven features by Marily Nika, Gen AI Product Lead at Google.
Events
Last Friday, we hosted Greeks In Tech in London. Seven founders rocked the stage and 300+ attendees joined us.

Greeks In Tech DACH tour is on: Berlin (Feb 25), Munich (Feb 26), Zurich (Feb 28)
Open Coffee Athens #121 on Feb 7
Driving Innovation in the Startup Ecosystem Patras on Feb 1
GreeceJS #51 on Feb 5
Java Athens meetup on Feb 6
Athens Shopify meetup on Feb 7
Patras Tech Talk on Feb 12
START your night UP on Feb 12
That’s all for this week. Tap the heart ❤️ below if you liked this piece—it helps me understand which themes you like best and what I should do more.
Thanks for reading,
Alex
Don't forget START your night UP in Thessaloniki as well on the 13th of February 😉
The state of robotics is that the industry is stuck trying to control movements and orientation without the foundational theory for locomotion. We want robots for their hands, but we need their hands attached to something mobile. A humanoid robot. Legs are better than wheels when you are not on level concrete, provided you can stay upright. But you won’t engineer such a legged robot (see current state of the art) if you don’t understand the mechanics and control of jointed systems. Everyone thinks you can brute force your way to understanding with AI, but seem to forget that AI relies on fundamental understanding first.
I figured out the theory for locomotion. The proof is the ability to predict the kinetics and kinematics of animals, humans included. You can’t read about the theory, because there is no forum for publishing a fundamental theory that doesn’t build on existing ideas. When all current ideas are based on linearized models, and the theory is about a system of nonlinear rotations, you can’t evolve from one to the other. You have to start over. But there is no forum for that, because nobody wants to admit that they have to start over.
Perhaps there are enterprising individuals out there who are willing to relearn mechanics and apply that knowledge to engineer a humanoid robot that reliably and efficiently controls its movements. I would love to know who they are and to reward their courage with the insights that can make them leaders in the field.